



Exploring Mars is a challenging task. Getting there is a difficult task itself, but traveling on the surface of the Red Planet is tricky as well because of the many craters and boulders. So what if we sent lizard-like robots instead of rovers?
Researchers from Nanjing University of Aeronautics and Astronautics (NUAA) created such a four-legged robot. It’s constructed of 3D-printed resin and can simulate a desert lizard’s movement and “creeping” locomotion style. The researchers contend that traversing the soft granular soil and rocky surface of Mars is difficult for both rovers and legged walking robots. The lizard robot might perform better than them in this situation.

It is a biomimetic machine which means that it is capable of mimicking elements of nature. It possesses a flexible spine, four legs with four distinct toes, claws, hinges, hip joints, and gears. It’s interesting to note that each component has a vital secondary purpose in addition to their primary ones. For instance, the lizard can move more quickly and with greater strides than traditional exploratory robots because of its flexible spine.
The lizard robot is more stable than legged walking robots because it has a lower center of mass due to its creeping legs. The robot, unlike rovers, has claws and several toes, enabling a firm hold on even slick granular surfaces. Moreover, the robot’s legs’ four-linkage mechanism maintains it balanced as it tries to elevate its body. A 12 Volt lithium-ion battery powers the lizard, which also has wiring, voltage regulators, and control panels. The robot can swing steadily and tightly grasp soil and rocks thanks to the interaction of all these parts.
The researchers created many kinematic models—the mathematical justification of a robot’s motion and movement-related abilities—after initially studying the coordinated movement and locomotion style of real desert lizards. Various mathematical models were developed and put to the test for various lizard components. The researchers then began training the robots using these models and additional calculations. The robot eventually developed the ability to crawl and move like a desert lizard when model learning was finished.
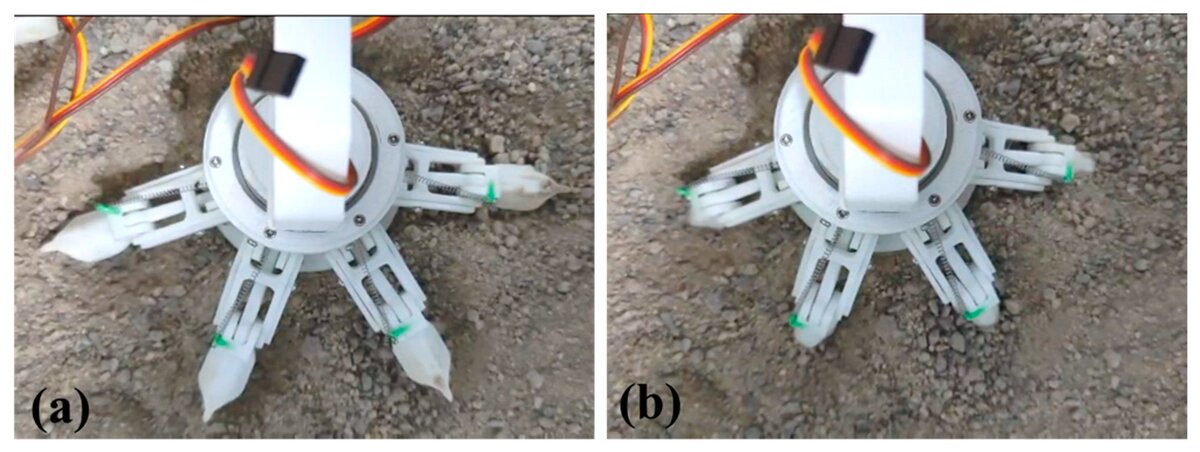
They placed the four-legged robot in a replica of a Mars-like habitat with a surface and terrain to further evaluate its creeping capabilities. The mechanical lizard did a fantastic job in this experiment. The study’s authors further highlighted the test results by saying:
“Experimental tests demonstrated that the biomimetic robot is suitable for granular soils and rocky surfaces, which is of high potential for walking on the Mars surface terrains. Thus, this work progresses the development of Mars robots for surface exploration.”
The robot lizard’s performance will be enhanced by more modifications to its structure, parts, and body materials. They also intend to put the robot through further rigorous testing in Mars-like circumstances.

